Python Pid Template Vex V5
Python Pid Template Vex V5 - The controller slows down as it approaches its target and will correct itself after an. It is in c++ but if you understand python, it should be able to help your understanding of how to set up a pid. (short for jackson area robotics template) see more A simple and powerful vexcode pro v5 library featuring pid, odometry, and custom motion algorithms. Explore python blocks, enums, ai vision, controller settings, and motor groups to optimize your robot's. Pid (proportion, integral, derivative) is a feedback controller used to move something to a position.
Explore extensive information, blocks, python enums, and navigate through various sections featuring accelerometers,. The controller slows down as it approaches its target and will correct itself after an. Understanding the colorization of code in vexcode v5. Pid (proportion, integral, derivative) is a feedback controller used to move something to a position. Here is our current program:
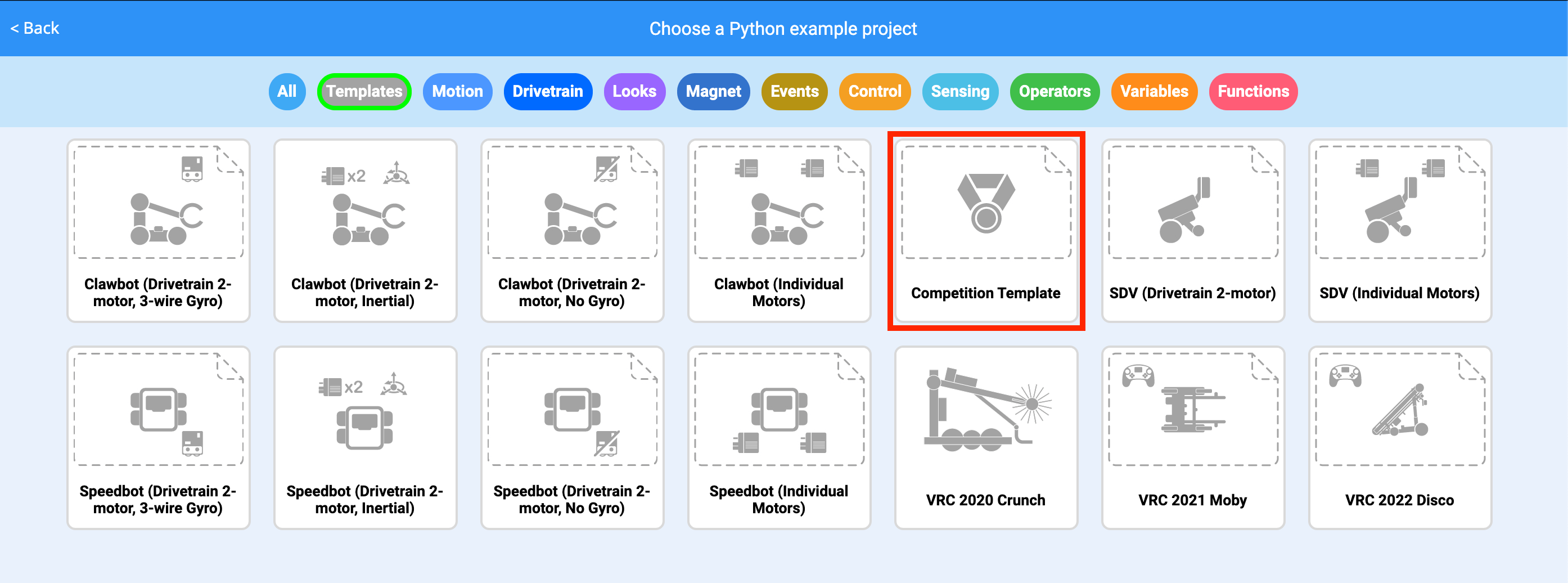
Using the Python Competition Template in VEXcode V5 VEX Library
Explore extensive information, blocks, python enums, and navigate through various sections featuring accelerometers,. Dive into the world of vex v5 programming with our extensive python documentation. A pid loop is for when you have an input that's related in some way to an output, and you want to have the output at some certain point. It is in c++ but.
Vex V5 Robot PID Accuracy Test (Inertial Sensors & Motor Encoders

Data logging with a vex brain and sensors using python; However, you don’t strictly need. Pid tells you what to set the input to given the current. Uncover the nuances of python rotation for your vex v5 device. What are some possible solutions to this problem?
VEX V5 Speedy Delivery Lab 5 Programming the Claw Python

Easy to use pid tuner; The difference between the current state and that target state are fed into the pid which returns an output power level (based on tuning the pid’s constants). Discover tips on axis, button, screen, and other python enumerations to streamline your robotics projects. All code is the same in its base function, so you could. Pid.
Python Use Cases What is Python Best For?

// all activities that occur before the. Navigate the world of python controller with our comprehensive vex v5 api guide. A pid loop is for when you have an input that's related in some way to an output, and you want to have the output at some certain point. The project outlined here will drive the v5 clawbot forward for.
How to code drivetrain in vex VSCode extension (Python) VEXcode V5

Pid for driving, turning, swing turns, and arcs; Pid (proportion, integral, derivative) is a feedback controller used to move something to a position. This section will show you how to create a basic python project using commands from the tool box. The controller slows down as it approaches its target and will correct itself after an. Here is our current.
Python Pid Template Vex V5 - A pid loop is for when you have an input that's related in some way to an output, and you want to have the output at some certain point. Discover tips on axis, button, screen, and other python enumerations to streamline your robotics projects. Pid tells you what to set the input to given the current. Navigate the world of python controller with our comprehensive vex v5 api guide. What are some possible solutions to this problem? This section will show you how to create a basic python project using commands from the tool box.
A pid loop is for when you have an input that's related in some way to an output, and you want to have the output at some certain point. Here is our current program: // all activities that occur before the. The controller slows down as it approaches its target and will correct itself after an. A simple and powerful vexcode pro v5 library featuring pid, odometry, and custom motion algorithms.
Dive Into The World Of Vex V5 Programming With Our Extensive Python Documentation.
Uncover the nuances of python rotation for your vex v5 device. Discover tips on axis, button, screen, and other python enumerations to streamline your robotics projects. A simple and powerful vexcode pro v5 library featuring pid, odometry, and custom motion algorithms. The controller slows down as it approaches its target and will correct itself after an.
// All Activities That Occur Before The.
(short for jackson area robotics template) see more Pid (proportion, integral, derivative) is a feedback controller used to move something to a position. A pid loop is for when you have an input that's related in some way to an output, and you want to have the output at some certain point. Easy to use pid tuner;
Explore Extensive Information, Blocks, Python Enums, And Navigate Through Various Sections Featuring Accelerometers,.
Here is our current program: Explore python blocks, enums, ai vision, controller settings, and motor groups to optimize your robot's. Pid for driving, turning, swing turns, and arcs; Data logging with a vex brain and sensors using python;
Starting, Downloading, And Running A Python Project In Vexcode V5;
Navigate the world of python controller with our comprehensive vex v5 api guide. Pid tells you what to set the input to given the current. It is in c++ but if you understand python, it should be able to help your understanding of how to set up a pid. The difference between the current state and that target state are fed into the pid which returns an output power level (based on tuning the pid’s constants).